Subskrybuj nasze media społecznościowe, aby otrzymywać szybkie posty
Pierścieniowe żyroskopy laserowe (RLG) znacznie się rozwinęły od momentu ich powstania, odgrywając kluczową rolę we współczesnych systemach nawigacyjnych i transportowych. Niniejszy artykuł omawia rozwój, zasadę działania i zastosowania RLG, podkreślając ich znaczenie w bezwładnościowych systemach nawigacyjnych oraz ich wykorzystanie w różnych mechanizmach transportowych.
Historyczna podróż żyroskopów
Od koncepcji do nowoczesnej nawigacji
Historia żyroskopów rozpoczęła się od wspólnego wynalezienia pierwszego żyrokompasu w 1908 roku przez Elmera Sperry'ego, nazywanego „ojcem nowoczesnej technologii nawigacyjnej”, oraz Hermana Anschütza-Kaempfego. Z biegiem lat żyroskopy zostały znacząco udoskonalone, zwiększając ich użyteczność w nawigacji i transporcie. Dzięki tym postępom żyroskopy stały się kluczowym elementem stabilizującym lot samolotu i umożliwiającym działanie autopilota. Godna uwagi demonstracja Lawrence'a Sperry'ego w czerwcu 1914 roku zademonstrowała potencjał żyroskopowego autopilota, stabilizując samolot, gdy Sperry stał w kokpicie, co stanowiło znaczący krok naprzód w technologii autopilota.
Przejście na żyroskopy laserowe pierścieniowe
Ewolucja ta trwała do momentu wynalezienia pierwszego pierścieniowego żyroskopu laserowego w 1963 roku przez Maceka i Davisa. To innowacyjne rozwiązanie zapoczątkowało przejście od żyroskopów mechanicznych do żyroskopów laserowych, które oferowały wyższą dokładność, niższe koszty konserwacji i niższe koszty. Obecnie pierścieniowe żyroskopy laserowe, zwłaszcza w zastosowaniach wojskowych, dominują na rynku ze względu na swoją niezawodność i wydajność w środowiskach, w których sygnały GPS są zakłócane.
Zasada działania pierścieniowych żyroskopów laserowych
Zrozumienie efektu Sagnaca
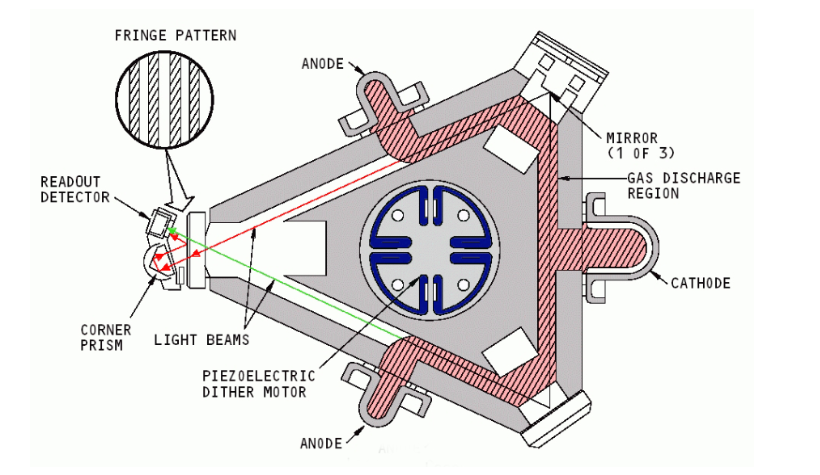
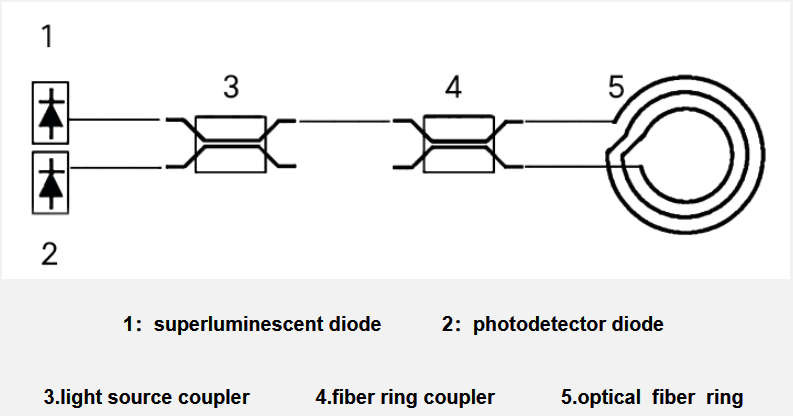
Podstawową funkcjonalnością interferometrów RLG jest ich zdolność do określania orientacji obiektu w przestrzeni inercyjnej. Osiąga się to poprzez efekt Sagnaca, w którym interferometr pierścieniowy wykorzystuje wiązki laserowe poruszające się w przeciwnych kierunkach po zamkniętej ścieżce. Wzór interferencyjny tworzony przez te wiązki działa jak stacjonarny punkt odniesienia. Każdy ruch zmienia długość drogi tych wiązek, powodując zmianę wzoru interferencyjnego proporcjonalną do prędkości kątowej. Ta pomysłowa metoda pozwala interferometrom RLG mierzyć orientację z wyjątkową precyzją, bez polegania na zewnętrznych odniesieniach.
Zastosowania w nawigacji i transporcie
Rewolucja w bezwładnościowych systemach nawigacyjnych (INS)
RLG odgrywają kluczową rolę w rozwoju bezwładnościowych systemów nawigacyjnych (INS), które są kluczowe do naprowadzania statków, samolotów i pocisków w środowiskach pozbawionych sygnału GPS. Ich kompaktowa, beztarciowa konstrukcja sprawia, że idealnie nadają się do takich zastosowań, przyczyniając się do bardziej niezawodnych i dokładnych rozwiązań nawigacyjnych.
Platforma stabilizowana kontra system INS z pasami mocującymi
Technologie INS ewoluowały, obejmując zarówno systemy platform stabilizowanych, jak i systemy mocowań pasowych. Systemy platform stabilizowanych INS, pomimo swojej złożoności mechanicznej i podatności na zużycie, oferują solidną wydajność dzięki integracji danych analogowych.Z drugiej strony, systemy INS z mocowaniami typu strap-down korzystają z kompaktowej i bezobsługowej konstrukcji systemów RLG, co sprawia, że są preferowanym wyborem w nowoczesnych samolotach ze względu na opłacalność i precyzję.
Ulepszanie nawigacji rakietowej
RLG odgrywają również kluczową rolę w systemach naprowadzania inteligentnej amunicji. W środowiskach, w których GPS jest zawodny, RLG stanowią niezawodną alternatywę dla nawigacji. Ich niewielkie rozmiary i odporność na ekstremalne siły sprawiają, że nadają się do pocisków rakietowych i artyleryjskich, czego przykładem są systemy takie jak pocisk manewrujący Tomahawk i M982 Excalibur.

Schemat przykładowej platformy stabilizowanej bezwładnościowo z zawieszeniem kardanowym, wykorzystującej mocowania. Dzięki uprzejmości Engineering 360.
Zastrzeżenie:
- Niniejszym oświadczamy, że niektóre obrazy prezentowane na naszej stronie internetowej pochodzą z Internetu i Wikipedii, a ich celem jest promocja edukacji i dzielenie się informacjami. Szanujemy prawa własności intelektualnej wszystkich twórców. Wykorzystanie tych obrazów nie ma na celu osiągnięcia korzyści komercyjnych.
- Jeśli uważasz, że jakakolwiek wykorzystana treść narusza Twoje prawa autorskie, skontaktuj się z nami. Chętnie podejmiemy odpowiednie kroki, w tym usuniemy obrazy lub zapewnimy prawidłowe oznaczenie autorstwa, aby zapewnić zgodność z przepisami i regulacjami dotyczącymi własności intelektualnej. Naszym celem jest utrzymanie platformy bogatej w treści, uczciwej i szanującej prawa własności intelektualnej innych osób.
- Prosimy o kontakt pod następującym adresem e-mail:sales@lumispot.cnZobowiązujemy się do podjęcia natychmiastowych działań po otrzymaniu powiadomienia i gwarantujemy 100% współpracę w rozwiązywaniu wszelkich tego typu problemów.
Czas publikacji: 01-04-2024